研究内容

人の認知・判断・行動特性に主眼を置き、
人と機械のコラボレーションを支援するシステムの実現を目指す。
人と機械とのインタラクション
認知システムデザイン研究室では、ヒューマンマシンシステムの研究を行っています。特に、状況に応じた人間とコンピュータの協調のあり方およびそれを実現するためのヒューマンインタフェースの研究を行っています。
研究の2つのアプローチ
「認知工学的アプローチ」
人の認知特性と意思決定過程を考慮に入れ、人間が行うタスクを支援するシステムをデザインします。
「理論的アプローチと実験的アプローチの融合」
人間の意思決定過程の数理モデルを構築し、それを解析することによって、人間の振る舞いがどのような要因に影響をうけるかなどを明らかにするとともに、人間の振る舞いの予測を試みます。
ドライビングシミュレータなどでの心理学的実験を行い、実際の人間の振る舞いを観察して数理モデルを改良したり、数理モデルから有効性が示唆されるシステムデザインの認知工学的評価を行ったりします。
やや近い将来における実践を目指して
当研究室ではこれまでにも航空機におけるヒューマンインタフェースの研究などにも取り組んでいますが、ヒューマンファクターの視点を取り入れることが期待されている分野、また、そう遠くない将来に私たちのアイデアを具現化できる分野として、現在もっとも重点的に対象としているものは自動車です。
自動車の高度自動化が進展していますが、状況認識支援の観点からだけでなく、自動化システムへの不信や過信あるいはオートメーション・サプライズを解消するためには、ヒューマンインタフェースはどのようなものでなければならないかを、自動車メーカーとの共同研究等で研究しています。
ドライバの適切なシステム使用を導く自動運転に関する安全教育方法の開発
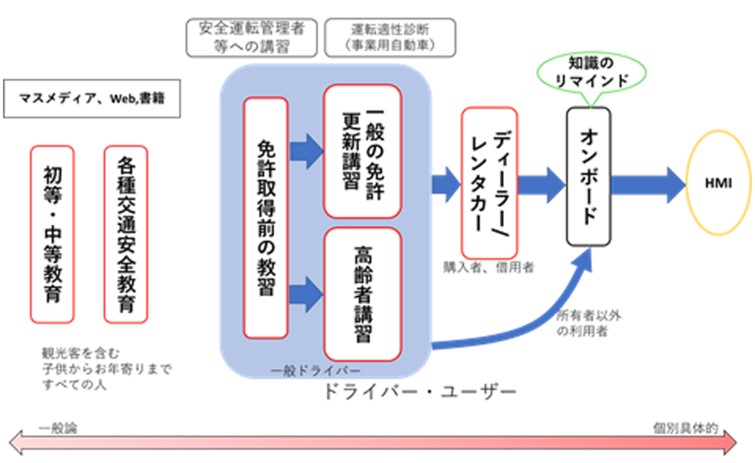
レベル3の自動走行システムが使用条件を満たさなくなる場合等には,ドライバに運転操作の引継ぎ要請を提示される.ヒューマン・マシン・インタフェース(HMI)は,ユーザー(ドライバ)が自動走行システムの機能・状態・動作の理解を適切に行えるためのツールとして研究されてきた.また,ユーザーがHMIを適切に理解できるためには,最低限いくつかの予備知識を持つ必要がある.そこで,本研究では,自動走行システムに関する事前知識が及ぼす影響を把握し,ドライバの安全なシステム使用と繋がる安全教育方法に着目する.自動走行システムに関する事前知識によって引き継ぎ要請がドライバに及ぼす影響の変化を定量的に調べることで事前知識の必要性を明瞭にした(Zhou et al., 2021a, 2021b).現在は,ドライバ以外のユーザーに対しても展開できる効果的安全教育方法に取り組んでいる.詳しくは,安全な引き継ぎ行動と適切な信頼感を導く教育方法の開発とその効果検証を狙う.
Keywords: Driving Automation, Education, Human-machine interface, Request-to-intervene, Driver attitude
関連文献
- Zhou, H., Kamijo, K., Itoh, M., & Kitazaki, S. (2021a). Effects of explanation-based knowledge regarding system functions and driver’s roles on driver takeover during conditionally automated driving: A test track study. Transportation Research Part F: Psychology and Behaviour, 77(February 2021), 1-9.
- Zhou, H., Itoh, M., & Kitazaki, S. (2021b). How Do Levels of Explanation on System Limitations Influence Driver Intervention to Conditional Driving Automation?. IEEE Transactions on Human-Machine Systems, 51(3), 188-197.
- Zhou, H., Itoh, M., & Kitazaki, S. (2021c). Influence of Prior General Knowledge on Older Adults’ Takeover Performance and Attitude toward Using Conditionally Automated Driving Systems. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 65(1). (in press)
Human-Machine Cooperation, Cooperative Guidance, and Shared Control
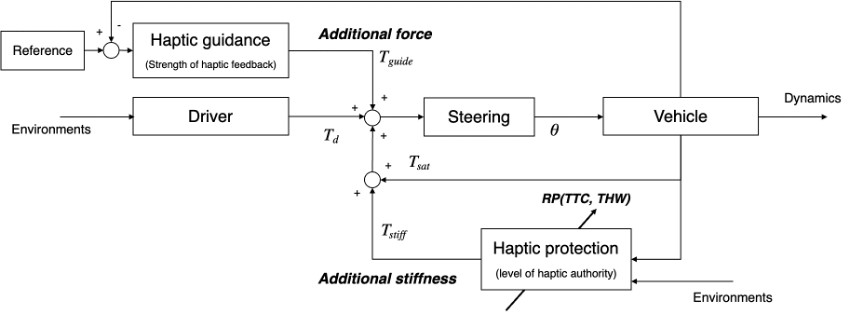
安全性・信頼性を確保するうえで,人と自動化システムのコミュニケーションのデザインは要である.1900年頃,人のモビリティの手段は,馬車から自動車に移ったが,1) 馬が有する知能や安全本能, 2) 乗り手と馬の双方が対話・コミュニケーションする能力は損なわれたままである.人を含めた系の安全性・信頼性の向上に向けて,本研究では,操作レベルで人と機械が制御権限を共有しながら共通の行為を実行するシェアードコントロールや戦術レベルで意思決定支援を含むcooperative guidance control のシステムデザインのあり方を探究する.
Keywords: Automation, shared Control, Cooperative guidance control, Communication, Horse metaphor.
関連文献
- Muslim, H., & Itoh, M. (2018). Effects of human understanding of automation abilities on driver performance and acceptance of Lane change collision avoidance systems. IEEE Transactions on Intelligent Transportation Systems, 20(6), 2014-2024.
- Saito. Y., Itoh. M., & Inagaki. T. (2016). Driver Assistance System with a Dual Control Scheme: Effectiveness of Identifying Driver Drowsiness and Preventing Lane Departure Accidents. IEEE Transactions on Human-Machine Systems, 46(5), 660-671.
- Itoh. M., & Inagaki. T. (2013). Design and Evaluation of Steering Protection for Avoiding Collisions during a Lane-Change. Ergonomics, 57(3), 361-373.
自動化機械に対する人間の信頼感:信頼感の醸成過程・要因分析
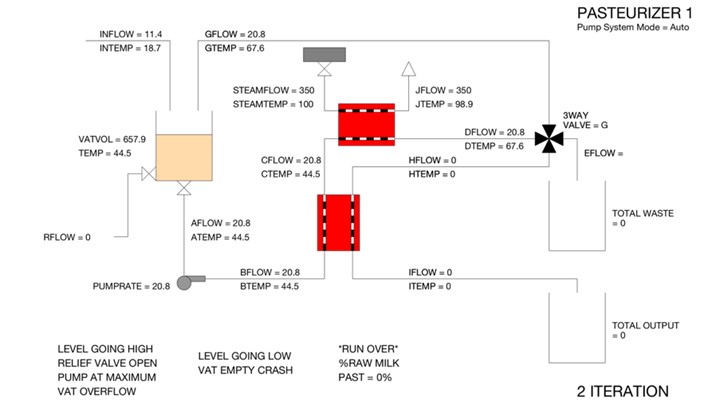
一般の人々が使える機械の自動化が実現されているなか,多くの自動化機械はオペレータの監視制御を求めている.しかし,このように機械における十分な知識を有してない状態では,技術に対する人間の信頼感が十分に醸成されない恐れがある.このような文脈で,技術に対する人間の信頼感は自動化機械の使用を左右する重要な要因として注目されている.この研究では,未知の技術に対するユーザーの信頼感がどのように醸成されるか,また,その信頼感を支配する要因を明らかにすることで,ヒューマンマシンシステムのデザインに重要な視点を提供する.また,本研究では,ユーザーの信頼感の形成構造・要因をモデル化し,様々な自動化システムの分野にも適用し,その拡張性を検証する.
Keywords: Trust, Supervisory control, Human-machine system, Naïve users, Pasteurization plant.
関連文献
- Lee. J., Yamani, Y., Long. S., Unverricht., J., & Itoh. M. (2021). Revisiting Human-Machine Trust: A Replication Study of Muir & Moray (1996) Using a Simulated Pasteurizer Plant Task. Ergonomics.
- Yamani, Y., Long, S. K., & Itoh, M. (2020). Human–Automation Trust to Technologies for Naïve Users Amidst and Following the COVID-19 Pandemic. Human Factors, 62(7), 1087–1094.
- Moray, N., Inagaki, T., & Itoh, M. (2000). Adaptive automation, trust, and self-confidence in fault management of time-critical tasks. Journal of Experimental Psychology–Applied, 6, 44–58.
視野障害者のための運転支援システム設計
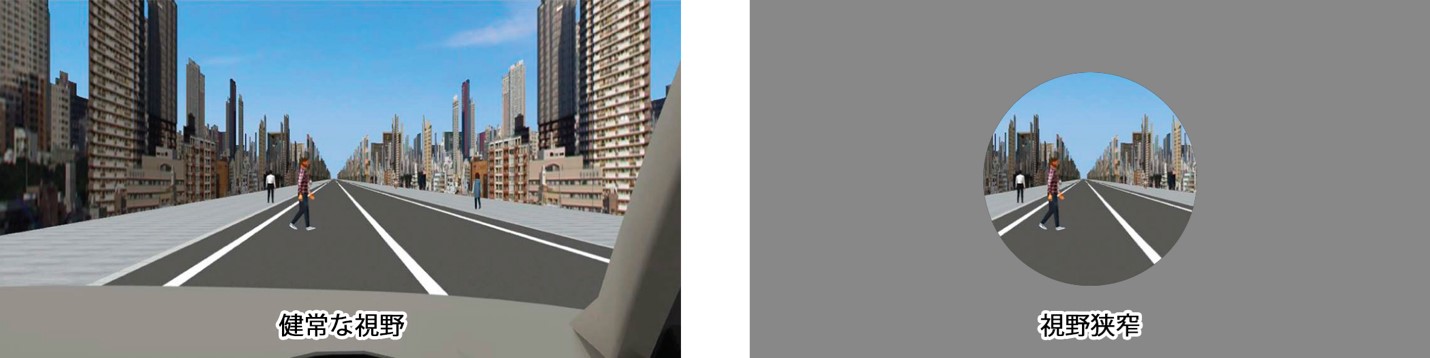
運転中,ドライバはおよそ9割の情報を視覚から得ている.視力とともに,ドライバの情報処理過程に最も影響するのは視野であり,視野に見えない箇所が生じる症状を視野障害という(体表的な例として,緑内障がある).ドライバの視野が狭いほど,周辺状況への認識ができなくなる可能性が高い.そこで,ドライバ自身がこの視野障害を補えるためのとる補償的運転行動,または,ドライバが自身の能力だけでは克服できない限界を支援するシステムのデザインが必要である.本研究では,視野障害の程度,補償行動の類等のドライバの行動特性を考慮した上で,視野障害を有するドライバの交通安全を探る運転支援システムの提案を目的とする.
Keywords: Visual Field Defects, Hazard perception, Information processing, Driver assistance system.
関連文献
- Lee. J., & Itoh, M. (2020). Effects of driver compensatory behaviour on risks of critical pedestrian collisions under simulated visual field defects. PLoS ONE, 15(4), e0231130.
- Lee, J., Itoh, M., & Inagaki, T. (2016). Effectiveness of Driver Compensation to Avoid Vehicle Collision under Visual Field Contraction. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 60(1), 1911–1915.
- Kunimatsu-Sanuki, S., Iwase, A., Araie, M., Aoki, Y., Hara, T., Nakazawa, T., Yamaguchi, T., Ono, H., Sanuki, T. & Itoh, M. (2015). An Assessment of driving fitness in patients with visual impairment to understand the elevated risk of motor vehicle accidents. BMJ Open, 5(2), e006379.
シェアードスペースでの交通安全確保手法の検討

シェアード・スペースは道路利用者の形態(自動車や自転車,歩行者など)の空間的分離を最小化する,将来の都市デザインへのアプローチのひとつである.それを設計する上で,歩行者の安全を確保するために,歩行者の道路横断行動のパターンやそれに影響を与える要因を明らかにする必要がある.従来の研究では,実際に作成した道路モデルにおける自転車を用いた道路横断行動の分析や,歩行者の交通事故記録の分析によってその要因を検討してきた.しかし,急な加減速など,車両の動きを正確にコントロールすることは容易ではなく,実際の車両を用いた実験には限界があると考えられる.そこで,バーチャルリアリティ環境において任意のテストシナリオを設計することで,正確な車両の挙動かつ歩行者の安全が確保され,より効率的なデータの収集が可能となる.本研究では,車両の動きの要素ごとに異なるシナリオを設定し,学内のVR実験施設 (Large space) において実験を行うことで,歩行者がいつどのように道路横断の意思決定を行うのかを検証する.
Keywords: Shared space, Vulnerable road users, Virtual Reality, Large space.
関連文献
- Chen. Z., Takatori. H., Yamamoto. S., Kawamoto. M., & Itoh. M. (2018). Road-crossing behavior analysis in shared space, 信学技報, 118(100), pp. 17-20.
航空管制官の状況認識を支援する航空交通システムの開発
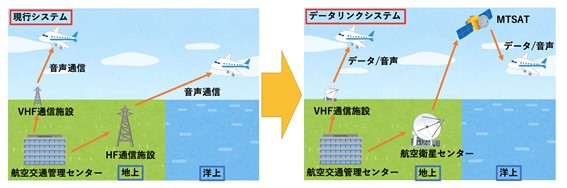
航空輸送量の増加は,航空管制官の情報処理に大きく影響する一つの要因として挙げられており,処理タスクの増加によるヒューマンエラーの発生率上昇に繋がり得る.このことから,現在の航空交通システムのままでは今後の航空機需要に対応できなくなる可能性が懸念されている.システムの性能向上や技術開発はもちろんのこと,管制官の業務方式や行動様式の改善が今後重要となると考え,本研究では,航空管制官の状況認識や作業負担を評価することで将来の航空交通システムのデザインやシステムのあり方を検討する.
Keywords: Air traffic control, Situation awareness, Workload, Data link communication, Work capacity.
関連文献
- Fujino, M., Lee, J., Hirano, T., Saito, Y., & Itoh, M. (2020). Comparison of SAGAT and SPAM for Seeking Effective Way to Evaluate Situation Awareness and Workload During Air Traffic Control Task. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 64(1), 1836–1840.
無人航空機のオペレータの行動分析を踏まえた安全な運用形態検討

2016年,アメリカ連邦航空局 (FAA) が無人航空機システムに関する新しい規則を設定したことから,世界的にドローン市場が急速に拡大し,商業用ドローンが社会に及ぼす影響も大きくなっている.一方で機体の故障による事故や犯罪への悪用などにより,莫大な損害をもたらす可能性も想定される為,各国ではドローンの安全な運用のための規制を策定中である.我が国でも,2022年度を目処に「有人地帯における補助者なし目視外飛行」 (レベル4) の実現を目標としている.本研究では,レベル4の運用に対するリスクの分析の一環として,飛行中の機体のGPS情報喪失をはじめとした不安定な状況での運用に注目し,シミュレータを用いた実験を行い操縦者の行動を分析する.これにより,発生しうるリスク要素を探り,安全な運用形態を提案する.
Keywords: Unmanned aerial vehicle, Drone, Risk management, Supervisory control.
関連文献
- 孟成柱, 伊藤誠, 涂念之, 藤野光希:「レベル4でのドローン操縦に向けたリスク分析:GPS喪失モードでの安全性について」, 日本品質管理学会第125回研究発表会, 2021.